
3月底路特斯汽车在英国发布了其最新纯电车型Eletre,4颗激光雷达也追平了喊出『4颗以下别说话』口号的长城机甲龙。两周后,新晋电动汽车品牌集度汽车揭秘了其首款汽车机器人概念车车头部位的设计细节,从目前曝光的资料来看,集度汽车将两颗激光雷达集成在了机舱盖上,此设计立即在车圈内引发热议。不得不说,2022年的激光雷达真的是很忙啊!先卷数量,现在都开始卷布局位置了!今天我们就好好地聊聊,『新四化』时代的关键传感器——激光雷达。
■ 「激光雷达」:高阶辅助驾驶必经之路

在说「激光雷达」的作用之前,我们需要先了解下「辅助驾驶」的分级。根据2021年1月1日开始全国实施的工信部《汽车驾驶自动化分级》规定,目前我国的驾驶自动化共总分为6级,从低往高依次为0~5级。各个等级标准,具体来说可以这么解释:
L0:完全由驾驶员持续进行横向和纵向的操作。
L1:大多数场景下仍然需要驾驶员持续进行横向和纵向的操作,具备自适应巡航、交通拥堵辅助、交通限速识别、车道保持、车道偏离预警等功能。
L2:驾驶员必须一直掌控驾驶,但在特定场景下系统可进行横向和纵向操作。
L3:驾驶员不必一直监控系统,但要随时做好准备接入和接管驾驶。系统会在极限场景下提示驾驶员介入和接管。
L4:驾驶员在定义当中的场景中不是必需的,即在定义的场景当中可以实现完全辅助驾驶。
L5:系统可自动应对汽车行驶过程当中的任何场景,不需要驾驶员,这是完全意义上的辅助驾驶。
根据目前世界上大部分国家对「辅助驾驶分级」的公共认知,L4级别及以下实质上都是「辅助驾驶」,只有L5级别才叫真正的「自动驾驶」。为了完成L3、L4级别这样更多脱离驾驶员干涉的「高阶辅助驾驶」时,传感器的选择就至关重要。
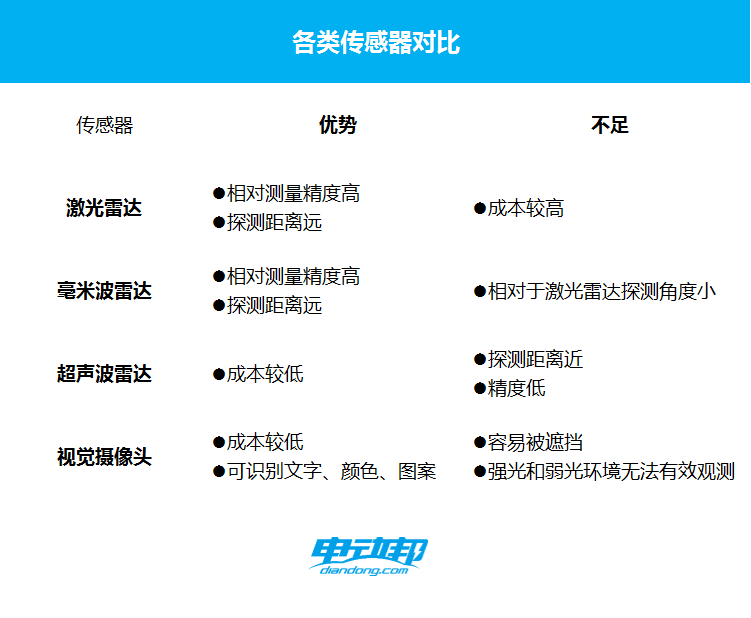
目前市场上应用于环境感知的主流传感器产品主要包括摄像头、毫米波雷达、超声波雷达和激光雷达四类。总体来看,摄像头在逆光或光影复杂的情况下视觉效果较差,毫米波雷达对静态物体识别效果差,超声波雷达测量距离有限且易受恶劣天气的影响,因此单独依靠摄像头或毫米波雷达的方案去实现智能驾驶是存在缺陷的。这个时候,激光雷达的出现填补了上述传感器的『短板』。

激光雷达工作原理简化图
从工作原理上讲,激光雷达与「雷达」非常相近。激光雷达以激光作为信号源,由激光器发射出的脉冲激光,接触到目标物后引起散射,一部分光波会反射到激光雷达的接收器上,根据激光测距原理计算,就得到从激光雷达到目标点的距离。脉冲激光以超高频率不断地扫描目标物,就可以快速复建出目标的三维模型及各种图件数据,建立三维点云图,绘制出环境地图,以达到环境感知的目的。
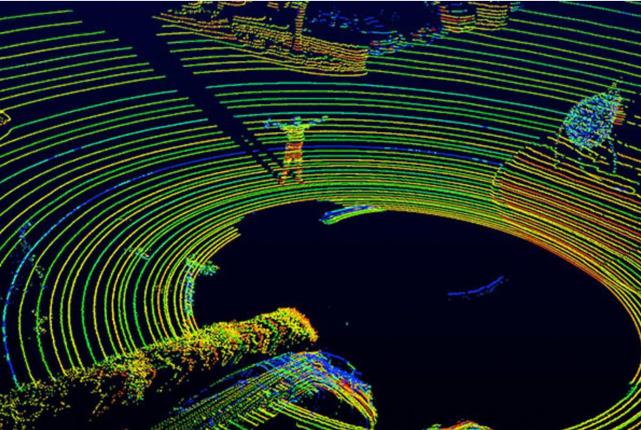
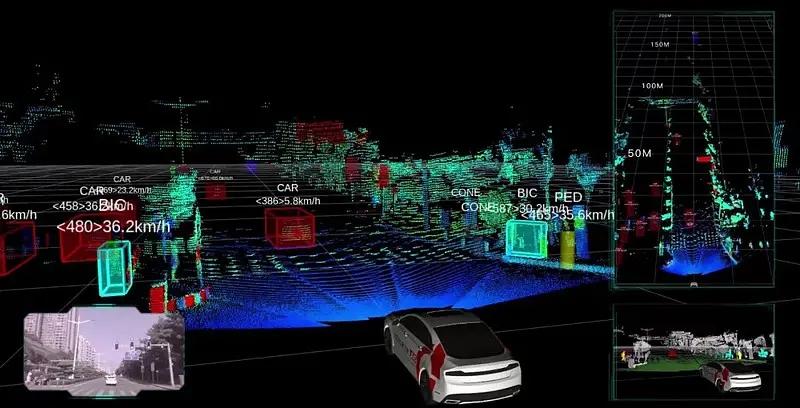
激光雷达的360度扫描成像画面
激光雷达在辅助驾驶中的核心特征可以概括为三维环境感知、高分辨率、强抗干扰能力。
三维环境感知:激光雷达在短时间内向周围环境发射大量的激光束,不仅可以通过测激光信号的时间差来确定物体距离,还可以通过水平旋转扫描或者向空扫描角度,以及获取不同俯仰角度的信号,来获得被测物体的精确三维信息。
高分辨率:激光雷达的角分辨率不低于0.1mard,也就是说可以分辨3000米距离上相距0.3米的两个目标;可以同时追踪多个目标,距离分辨率可以达到0.1mard,速度分辨率达到10m/s以内,由于激光频率高,波长短,所以可以获得极高的角度、距离和速度分辨率,如此高的速度和距离分辨率意味着激光雷达可以利用距离多普勒成像技术获得非常清晰的图像。
强抗干扰能力:与微波毫米波雷达雷达易受自然界广泛存在的电磁波影响的情况不同,自然界中能对激光雷达起干扰作用的信号源不多,因此激光雷达抗有源干扰的能力很强,可「全天候」工作。

各类传感器的感知范围示意图
智能汽车时代,单兵作战并不是最优解,多传感器互为『传感冗余』才是未来趋势。随着自动驾驶的逐级演进,感知层数据量呈指数级增长,弱感知将对芯片的性能和算力提出更高的要求,增加实现难度。不同传感器的原理和功能各不相同,在不同的场景里发挥各自的优势,难以相互替代。
未来的智能汽车可以视为『移动的传感器平台』,将装备有大量的传感器。随着辅助驾驶从L2向L3级及以上不断推进,其对安全性要求也越来越高,激光雷达便凭借其精度高、探测距离长、可3D环境建模的特性,在「高阶辅助驾驶」中扮演的角色愈发重要。
■ 市面上的激光雷达,只有两种是主流

如果把激光雷达按照扫描方式来分类,目前有「机械式激光雷达」、「半固态激光雷达」和「固态激光雷达」三大类。其中「机械式激光雷达」最为常用,「固态激光雷达」为未来业界大力发展方向,「半固态激光雷达」是机械式和纯固态式的折中方案,属于目前阶段量产装车的主力军。
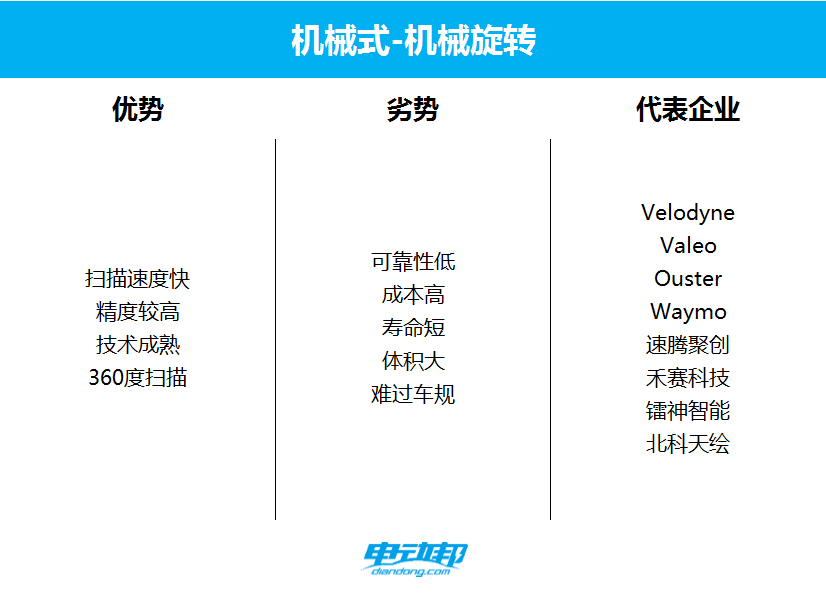
机械式-机械旋转激光雷达
虽然2021年是激光雷达爆发的元年,各大车企开启了量产级的传感器『军备竞赛』,但激光雷达在车端的应用并不是新鲜事。我们偶尔在路上会碰到的这种自动驾驶测试车,车顶上支架装的东西,便是激光雷达。这也是最早出现的车载激光雷达——「机械式激光雷达」,因为技术相对较成熟,所以大多数无人驾驶公司都用它来做自动驾驶的相关测试。

福特在CES 2016上无人车用到的Velodyne激光雷达
工作原理:发射和接收模块被电机电动进行360度旋转。在竖直方向上排布多组激光线束,发射模块以一定频率发射激光线,通过不断旋转发射头实现动态扫描。

百度Apollo自动驾驶项目测试车辆
优势:机械式激光雷达作为最早装车的产品,技术已经比较成熟,因为其是由电机控制旋转,所以可以长时间内保持转速稳定,每次扫描的速度都是线性的。并且由于『站得高』,机械式激光雷达可以对周围环境进行精度够高并且清晰稳定的360度环境重构。
劣势:虽然技术成熟,但因为其内部的激光收发模组线束多,并且需要复杂的人工调教,制造周期长,所以成本并不低,并且可靠性差,导致可量产性不高。其次,机械式激光雷达体积过大,消费者接受度不高。最后,它的寿命大约在1000h~3000h,而汽车厂商的要求是至少13000h,这也决定了其很难走向C端市场。

Waymo自动驾驶出租车头顶的机械式激光雷达
目前,机械式激光雷达的代表性厂商海外为Velodyne、Waymo、Valeo、Ouster,国内为速腾聚创、禾赛科技、镭神智能、北科天绘等。Velodyne的代表性产品包括HDL-64、HDL-32、VLP-16等在,价格范围在0.4万-8万美金之间。谷歌无人小车的64线激光雷达就来自Velodyne,当时价格高达7万美元。高昂的成本也决定了其目前主要应用于自动驾驶技术的开发领域,比如百度Robotaxi、谷歌无人驾驶测试车队,车规级前装量产市场暂无应用。
半固态-MEMS激光雷达

MEMS全称Micro-Electro-Mechanical System(微机电系统),是将原本激光雷达的机械结构通过微电子技术集成到硅基芯片上。本质上而言MEMS激光雷达并没有做到完全取消机械结构,所以它是一种半固态激光雷达。

MEMS激光雷达微振镜模块
工作原理:MEMS在硅基芯片上集成了体积十分精巧的微振镜,其核心结构是尺寸很小的悬臂梁——通过控制微小的镜面平动和扭转往复运动,将激光管反射到不同的角度完成扫描,而激光发生器本身固定不动。
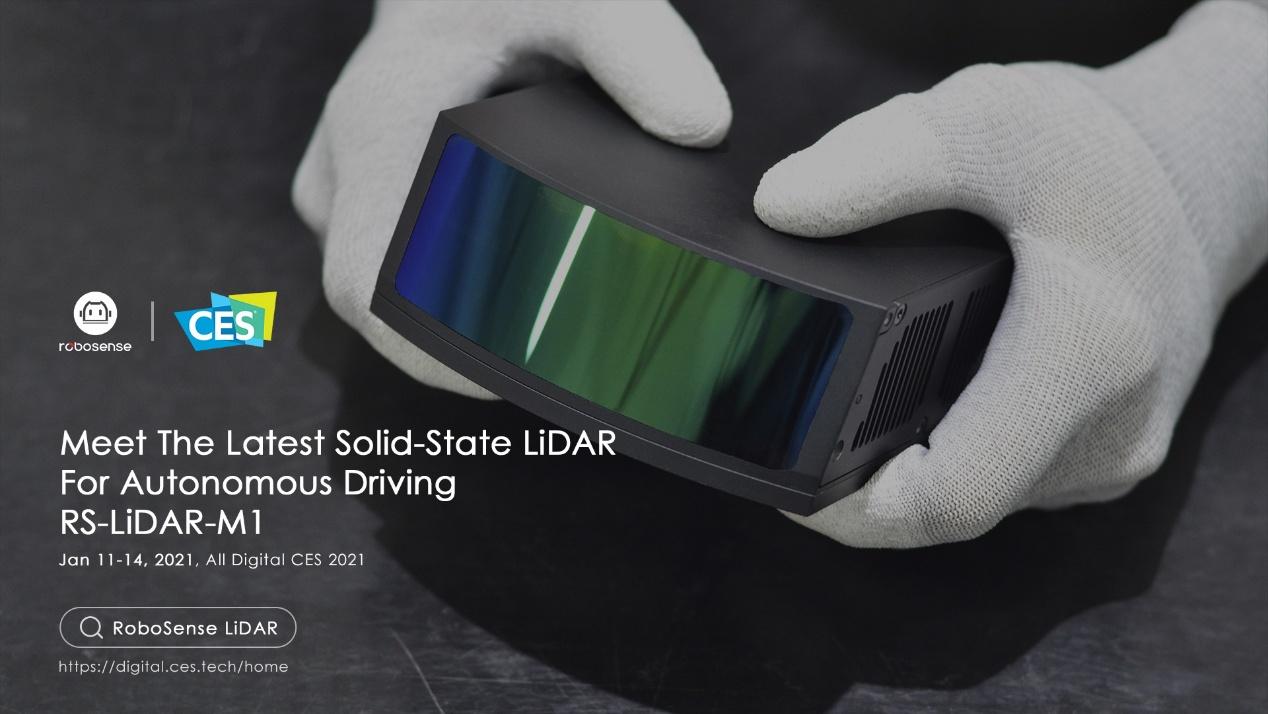
速腾聚创MEMS固态激光雷达RS-LiDAR-M1的量产版本
优势:MEMS激光雷达因为摆脱了笨重的「旋转电机」和「扫描镜」等机械运动装置,去除了金属机械结构部件,同时配备的是毫米级的微振镜,这大大减少了MEMS激光雷达的尺寸,与传统的光学扫描镜相比,在光学、机械性能和功耗方面表现更为突出。其次,得益于激光收发单元的数量的减少,同时MEMS振镜整体结构所使用的硅基材料还有降价空间,因此MEMS激光雷达的整体成本有望进一步降低。
劣势:MEMS激光雷达的「微振镜」属于振动敏感性器件,同时硅基MEMS的悬臂梁结构非常脆弱,外界的振动或冲击极易直接致其断裂,车载环境很容易对其使用寿命和工作稳定性产生影响。其次,MEMS的振动角度有限导致视场角比较小(小于120度),同时受限于MEMS微振镜的镜面尺寸,传统MEMS技术的有效探测距离只有50米,FOV角度只能达到30度,多用于近距离补盲或者前向探测。

速腾聚创与合作伙伴的签约仪式
目前,由于MEMS上游供应链已经相对成熟,比如Luminar的MEMS半固态激光雷达已将制造成本降低到了500-1000美元,使规模量产成为了可能。国内方面,速腾聚创和广汽埃安、威马、极氪等11家车企建立了合作,同时其产品「RS-LiDAR-M1」已于2020年12月开始批量出货,成为全球首款批量交付的车规级MEMS激光雷达。海外方面,Luminar在全球范围内已拥有50多位行业合作伙伴,其中包括沃尔沃、上汽飞凡汽车、小马智行等。
半固态-转镜式激光雷达

转镜式激光雷达与MEMS激光雷达差异在于,前者的扫描镜是围绕着圆心旋转,后者则是围绕着某条直径上下振动。相比之下,转镜式激光雷达的功耗更低,散热难度更低,因而也更容易拥有比较高的可靠性。

法雷奥应用于奥迪A8的转镜式激光雷达
工作原理:与MEMS微振镜平动和扭转的形式不同,转镜是反射镜面围绕圆心不断旋转,从而实现激光的扫描。在转镜方案中,也存在一面扫描镜(一维转镜)和一纵一横两面扫描镜(二维转镜)两种技术路线。一维转镜线束与激光发生器数量一致,而二维转镜可以实现等效更多的线束,在集成难度和成本控制上存在优势。

理想L9将搭载禾赛科技AT128转镜式激光雷达
优势:转镜式激光雷达的激光发射和接收装置是固定的,所以即使有「旋转机构」,也可以把产品体积做小,进而降低成本。并且旋转机构只有反射镜,整体重量轻,电机轴承的负荷小,系统运行起来更稳定,寿命更长,是符合车规量产的优势条件。
劣势:因为有「旋转机构」这样的机械形式的存在,便不可避免地在长期运行之后,激光雷达的稳定性、准确度会受到影响。其次,一维式的扫描线数少,扫描角度不能到360度。

奥迪A8上搭载的法雷奥Scala 1转镜式激光雷达
从应用看,具备车规级量产实力的Tier1供货商有法雷奥(Scala)、镭神智能(CH32),Innovusion(Falcon)。2017年,奥迪A8为全球首款量产的L3级别自动驾驶的乘用车,其搭载的激光雷达便是法雷奥和Ibeo联合研发的4线旋转扫描镜激光雷达。2020年,镭神智能自主研发的CH32面世,成为全球第二款获得车规级认证的转镜式激光雷达,目前已经规模化交付东风悦享量产前装车型生产。2022年,搭载Innovusion Falcon激光雷达的蔚来ET7上市,该款激光雷达为1550nm方案,等效300线数。从售价看,法雷奥Scala 2为900欧元(约6500元人民币),已经下降至车企可接受的价格范围。
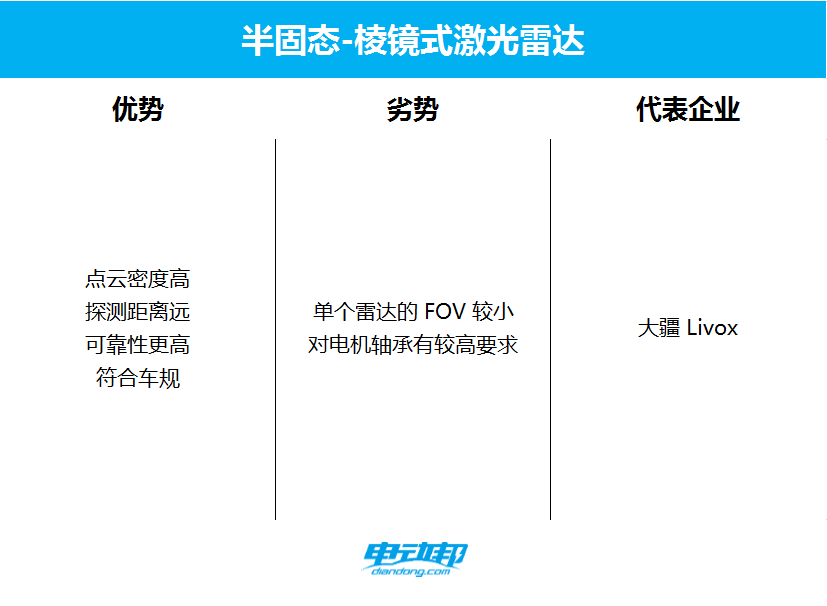
半固态-棱镜式激光雷达
无人机龙头厂商大疆孵化览沃科技(Livox)入局激光雷达,便是采用的棱镜式扫描方案,大疆利用其在无人机领域积累的电机精准调控技术及自动化产线,有信心克服棱镜轴承或衬套寿命的难题,也为其激光雷达技术构筑护城河。

棱镜式激光雷达工作示意图
工作原理:棱镜式激光雷达也称为双楔形棱镜式激光雷达,内部包括两个楔形棱镜,激光在通过第一个楔形棱镜后发生一次偏转,通过第二个楔形棱镜后再一次发生偏转。控制两面棱镜的相对转速便可以控制激光束的扫描形态。与前面提到的扫描形式不同,棱镜激光雷达累积的扫描图案形状状若菊花,而并非一行一列的点云状态。这样的好处是只要相对速度控制得当,在同一位置长时间扫描几乎可以覆盖整个区域。

大疆Livox 棱镜式激光雷达:Horiz(左) 与Horizon(右)
优势:首先,该设计减少了激光发射和接收的线数以实现一帧之内更高的线数,也随之降低了对焦与标定的复杂度,因此生产效率得以大幅提升,并且相比于传统机械式激光雷达,棱镜式的成本有了大幅的下降。其次,只要扫描时间够久,就能得到精度极高的点云以及环境建模,分辨率几乎没有上限,且可达到近100%的视场覆盖率。
劣势:棱镜式激光雷达FOV相对较小,且视场中心的扫描点非常密集,雷达的视场边缘扫描点比较稀疏,在雷达启动的短时间内会有分辨率过低的问题。对于高速移动的汽车来说,显然不存在长时间扫描的情况,不过可以通过增加激光线束和功率实现更高的精度和更远的探测距离,但机械结构也相对更加复杂,体积让前两者更难以控制,存在轴承或衬套的磨损等风险。

小鹏P5上搭载的大疆Livox 棱镜式激光雷达
从车规级应用来看,小鹏P5配备2颗大疆Livox车规级棱镜式激光雷达,另外大疆Livox也获得了一汽解放量产项目的定点 。针对单颗棱镜式中心区域点云密集。两侧点云相对稀疏的情况,小鹏P5选择在车前部署了2颗激光雷达,前方提高至 180度的超宽点云视野,提高应对近处车辆加塞、十字路口拐弯等复杂路况的通行能力。
固态-OPA激光雷达

针对车规级设备需要在连续振动、高低温、高湿高盐等环境下连续工作的特点,固态激光雷达成为了较为可行的发展方向。喜欢军事的朋友应该都听过军机、军舰上搭载的相控阵雷达,而OPA光学相控阵激光雷达便是运用了与之相似的原理,并把它搬到了车端。

OPA光学相控阵工作原理示意图
工作原理:相控阵雷达发射的是电磁波,OPA激光雷达发射的是光,而光和电磁波一样也表现出波的特性,所以原理上是一样的。波与波之间会产生干涉现象,通过控制相控阵雷达平面阵列各个阵元的电流相位,利用相位差可以让不同的位置的波源会产生干涉,从而指向特定的方向,往复控制便得以实现扫描效果。

Quanergy展示业界首款基于OPA的100米范围固态激光雷达
优势:OPA激光雷达发射机采用纯固态器件,没有任何需要活动的机械结构,因此在耐久度上表现更出众;虽然省去机械扫描结构,但却能做到类似机械式的全景扫描,同时在体积上可以做得更小,量产后的成本有望大大降低。
劣势:OPA激光雷达对激光调试、信号处理的运算力要求很大,同时,它还要求阵列单元尺寸必须不大于半个波长,因此每个器件尺寸仅500nm左右,对材料和工艺的要求都极为苛刻,由于技术难度高,上游产业链不成熟,导致 OPA 方案短期内难以车规级量产,目前也很少有专注开发OPA激光雷达的Tier1供应商。

Louay Eldada展示Quanergy S3
应用层面,目前暂无车规级量产案例,OPA方案的代表企业为Quanergy。2021年8月,Quanergy对其OPA固达态激光雷达S3系列完成驾驶实测演示。测试结果显示,S3系列固态激光雷达可以提供超过10万小时的平均无故障时间(MTBF),在全光照下实现100米的探测性能,大规模量产后的目标价格为500美元。
固态-FLASH激光雷达

由于结构简单,Flash闪光激光雷达是目前纯固态激光雷达最主流的技术方案。但是由于短时间内发射大面积的激光,因此在探测精度和探测距离上会受到较大的影响,主要用于较低速的无人驾驶车辆,例如无人外卖车、无人物流车等,对探测距离要求较低的自动驾驶解决方案中。
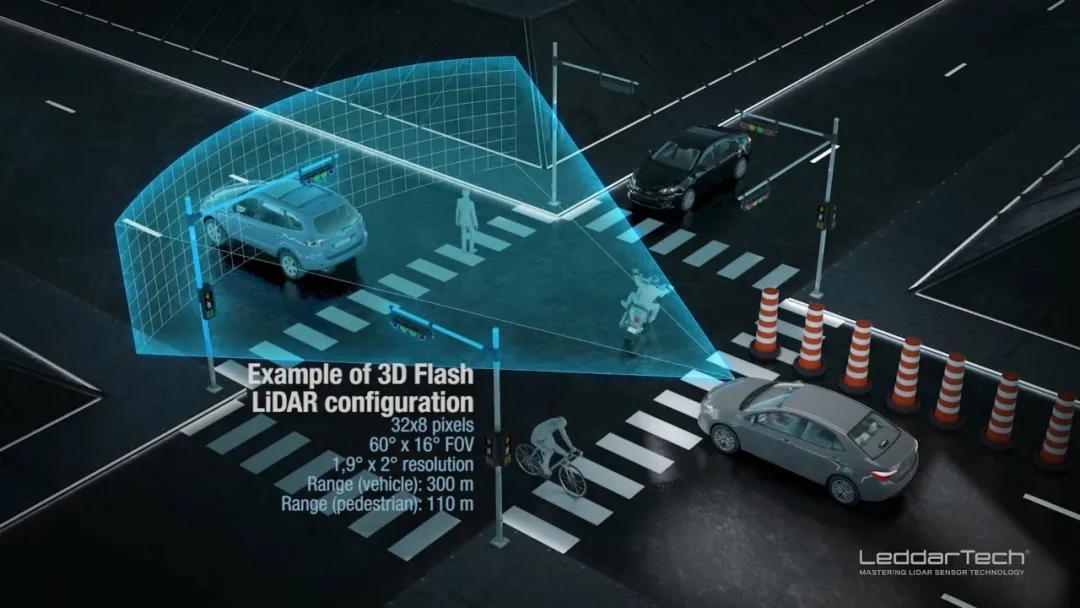
FLASH激光雷达工作示意图
工作原理:FLASH激光雷达的原理类似快闪,采用类似相机的模式,感光元件中的每个像素点都可以记录光子飞出的时间信息,运行时直接发射出一大片覆盖探测区域的激光,随后由高灵敏度的接收器阵列计算每个像素对应的距离信息,从而完成对周围环境的绘制。

FLASH激光雷达成像示意图
优点:FLASH激光雷达最大的优势在于可以一次性实现全局成像来完成探测,且成像速度快。体积小,易安装,易融入车的整体外观设计。设计简洁,元件极少,成本低。信号处理电路简单,消耗运算资源少,整体成本低。刷新频率可高达3MHz,是传统摄像头的10万倍,实时性好,因此易过车规。
缺点:不过FLASH激光单点面积比扫描型激光单点大,因此其功率密度较低,进而影响到探测精度和探测距离(低于50米)。要改善其性能,需要使用功率更大的激光器,或更先进的激光发射阵列,让发光单元按一定模式导通点亮,以取得扫描器的效果。
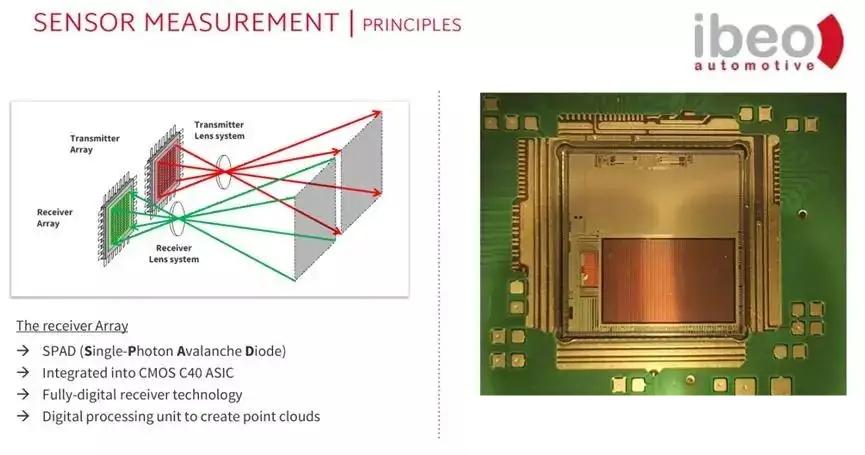
Ibeo FLASH激光雷达的接收模块
为了克服探测距离的限制,FLASH激光雷达的代表厂商Ibeo、LedderTech开始在激光收发模块进行创新。车规级激光雷达鼻祖Ibeo,则一步到位推出了单光子激光雷达,Ibeo称其为Focal Plane Array焦平面,实际也可归为FlASH激光雷达。2019年8月27日,长城汽车与德国激光雷达厂商Ibeo正式签署了激光雷达技术战略合作协议,三方合作的产品基础就是ibeonEXT Generic 4D Solid State LiDAR。从长远来看,FLASH激光雷达芯片化程度高,规模化量产后大概率能拉低成本,随着技术的发展,FLASH激光雷达有望成为主流的技术方案。
■ 激光雷达常见的布局方式
激光雷达应安装在车辆的什么位置?这是一个目前所有车企都在探索的话题。出于美观和实际应用的需求,车企有着不同的考虑,从目前已经发布的车型来看,前向主激光雷达主要部署在两个区域:车顶和保险杠/中网,但也有将激光雷达布置在前引擎盖和车身侧面的。
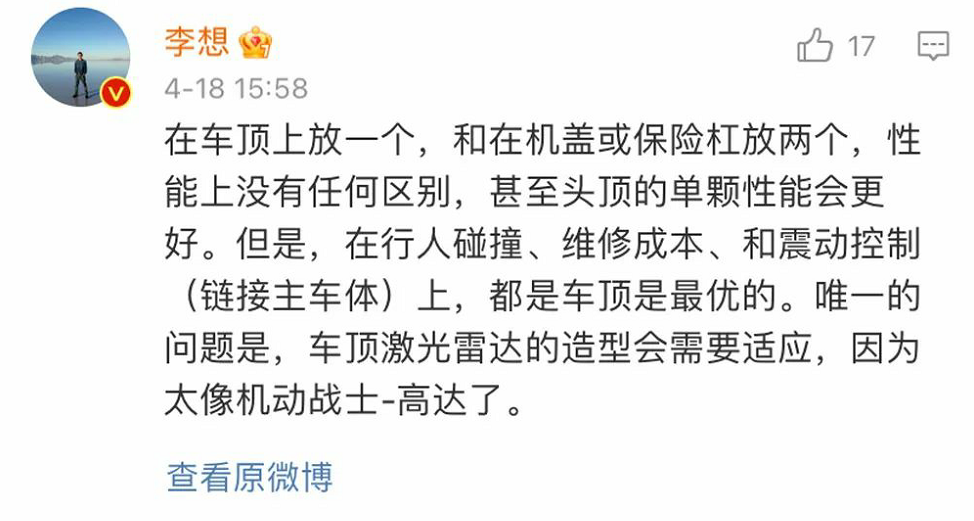
关于这个问题,前段时间业内人士也开展过相关的探讨。4月18日,集度汽车首款概念车头部细节曝光,搭载了两颗激光雷达,据悉在激光雷达不工作时,还可以伸缩至引擎盖内部。对此,理想汽车创始人李想便在相关微博下方发表了自己的看法:『在车顶上放一个,和在机盖或保险杠上放两个,性能上没有任何区别,甚至头顶的单性能会更好。但是,在行人碰撞、维修成本、和震动控制(链接主车体)上,都是车顶是最优的。唯一的问题是,车顶激光雷达的造型会需要适应,因为太像机动战士-高达了。』
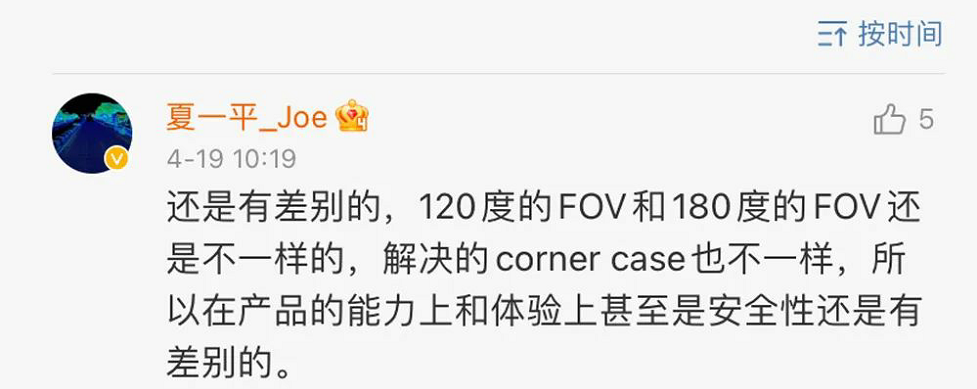
对此集度汽车CEO夏一平在评论下方回复 『还是有差别的,120度的FOV和180度的FOV还是不一样的,解决的corner case也不一样,所以在产品的能力上和体验上甚至还是安全性上还是有差别的。』
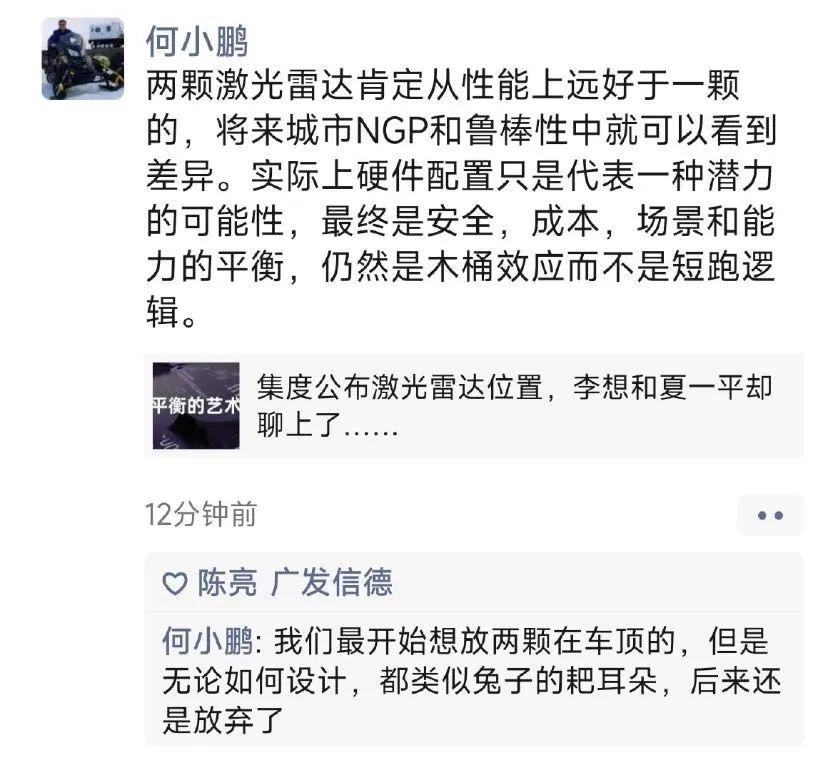
4月22日,小鹏汽车CEO何小鹏也在朋友圈发布了自己的看法,他表示『两颗激光雷达肯定从性能上是远好于一颗的,将来在城市NGP和鲁棒性中就可以看到差异』。放在哪里这个问题,何小鹏也曾纠结过,『我们最开始想放两颗在车顶的,但是无论如何设计,都类似兔子的粑耳朵,后来还是放弃了』。
那不同的位置究竟会带来哪些不同的影响,为此我们对市面上搭载激光雷达的车型进行了一次统计和总结。
车顶:单颗雷达效益最大化
 仅布局在车顶是目前市面上比较流行的做法,对于只配备1颗激光雷达的车型来说,放在车顶能最大程度地物尽其用。从目前的装车情况来看,安装在车顶上方的激光雷达,其形状普遍具备长而扁的特征。
仅布局在车顶是目前市面上比较流行的做法,对于只配备1颗激光雷达的车型来说,放在车顶能最大程度地物尽其用。从目前的装车情况来看,安装在车顶上方的激光雷达,其形状普遍具备长而扁的特征。

蔚来ET7车顶搭载的 Innovusion Falcon激光雷达
理想L9搭载的禾赛科技AT128、蔚来ET7搭载的Innovusion Falcon以及飞凡R7所搭载的Luminar Iris都拥有120度的水平FOV,而垂直FOV上ET7为30度,理想L9为25.4度,飞凡R7为26度,据媒体爆料,未来智己L7以及小米汽车也会将激光雷达布局在车顶。作为全车唯一的激光雷达,它们都能在车顶最大化自己的作用。

飞凡R7车顶搭载的Luminar Iris激光雷达
优势:可以看到,表格中的激光雷达基本以半固态方案为主,都达不到机械式的360度水平FOV,所以『欲穷千里目,更上一层楼』,车顶布置激光雷达可以带来更好的探测效果,而且不易被物体遮挡。同时,布局在车顶能避免大部分刮蹭碰撞事故对其产生的影响,把最贵的传感器放在最安全的地方,这无疑是一种保险的做法。
不足:主要体现在整车的美观度上,并不是所有消费者都能接受这种造型。其次,雨雪天气会受到较大干扰,且突出来的部分,也会带来来一些NVH的优化难题。同时,虽然越高视野越好,但地面线的盲区也越大,所以车顶布局需要进行视场角(FOV)下边缘跟车顶盖的倾角微调。最后,夏天阳光暴晒可能会导致元件温度过高,虽然激光雷达在80℃以内都可以工作,但长此以往,势必会加快激光雷达的老化速度。
车头:传统巨头的最爱

把激光雷达放置在车头貌似是传统大厂最爱的方式,BBA自家的旗舰车型均把激光雷达放在了这里。在很早就开始布局自动驾驶的传统大厂来看,激光雷达和毫米波雷达、超声波雷达一样,也是感知雷达的一种,所以把它放在这些老前辈呆的位置并无不妥,不过这样的布局优缺点都很明显。

新款奔驰S级将法雷奥Scala 2集成在中网
可以看到,奔驰奥迪两家大厂都被法雷奥拿下,法雷奥的第一代Scala便给到了奥迪A8,其垂直FOV为3.2度,水平FOV为145度,但探测距离仅有80米。新款奔驰S级上的是Scala第二代,升级后的产品也帮助奔驰成功获得了全球首个有条件自动驾驶(SAE-L3级)的系统国际认证。而唯一量产Flash 固态激光雷达的供应商Ibeo,则选择了与长城WEY进行合作。

奔驰EQS同样将法雷奥Scala 2集成在中网
优势:就像大家能明显感受到的那样,激光雷达布局在车头最大的优点就是没有存在感,整车的造型设计也不需要为其让步妥协。同时,可以通过布置多颗雷达的方案,弥补大部分半固态雷达FOV较小的缺点。
劣势:如今市面上车型的保险杠大多为塑料材质,虽然在碰撞事故中能减少对行人的伤害,但也将激光雷达置于了『危险』的境地,在激光雷达的规模成本下来之前,轻微的碰撞事故可能就会让车主付出高昂的维修费用。其次,激光雷达布置位置较低,更容易被污浊物遮蔽,影响探测效果,但现在已经开始有车企为激光雷达配备了「清洗装置」,因此这一点在未来并不是致命伤。
车身侧面: 多雷达的补盲方式
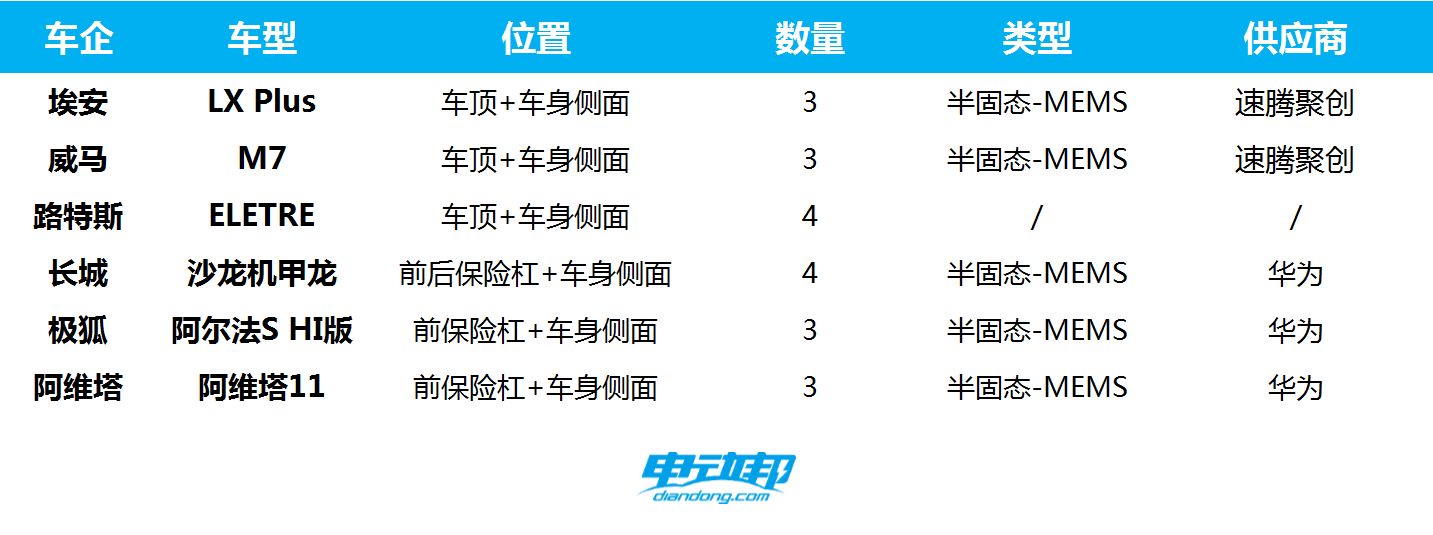
相比于前两种方案,多颗激光雷达的布局更倾向于补足『侧视能力』,除了负责前视的车顶或车头雷达,车企一般还会在车身侧面布置雷达,以形成接近全视域的传感闭环。可以看到,目前华为所有的激光雷达布局都是「保险杠+车身侧面」方案。在经费充足的情况下,车顶布局一颗前向长距激光雷达,车身安装多颗中短距角激光雷达也是更为合理且安全的方案。

威马M7搭载了3颗激光雷达
威马M7搭载3颗来自速腾聚创的M1激光雷达,分别位于车顶和翼子板两侧,可以实现水平探测范围达330度。而高调宣称『4颗以下别说话』的沙龙汽车,更是为其机甲龙配置了4颗激光雷达。同样采用4颗激光雷达方案的还有3月发布的路特斯ELETRE,其中有两颗「伸缩式」的128线激光雷达。

位于阿维塔11前轮拱后上方的激光雷达
优势:从覆盖面上来说,在车顶/车头安装一颗前向激光雷达的方案,在车辆四角补充2-4个中短距的激光雷达是最全面的做法,基本能做到360度的水平FOV,同时在垂直FOV上也大大提升,在L3级别的驾驶辅助向L4或更高级别的自动驾驶迈进的过程中,多激光雷达方案会逐渐成为主流。
劣势:高收益自然伴随着高风险,上述布局的缺点在多激光雷达方案里几乎都会涉及,不管是车顶雷达的热管理,还是车头雷达的易碰撞,多雷达的最大缺点可以说是成本了,无论是售前还是售后,多激光雷达方案都意味着需要付出更多的金钱。
机舱盖:另辟蹊径的集度

除了上述的三种主流布局方式,集度开创了机舱盖布局的先河,这是一种非常新颖的布局方式,也必然会引起行业内的诸多看法。

集度汽车机器人上的禾赛科技AT128激光雷达
在之前的沟通会上,我们确认了集度将采用禾赛科技的AT128激光雷达,在参数上与理想L9车顶的那颗相同。从官图中我们可以看出,集度2颗激光雷达分别位于引擎盖上方左右两端,类似复古的「跳灯」设计。

激光雷达降下后的样子
优势:集度双激光雷达方案的优势主要体现在水平FOV上,这颗禾赛科技AT128激光雷达水平FOV为120度,两个便能实现180度的覆盖。且正前方60度的重叠区域内,由于点云密度高,其识别能力也更强,精度更高。双激光雷达互为安全冗余,比单激光雷达方案的可靠性更强。在『鬼探头』、左右有遮挡物等行车场景中,对左右横穿行人或障碍物的识别能力更强。同时,「升降式」的激光雷达能在停车时将其收回去,避免长期停放的风吹日晒,延长使用寿命。
劣势:正如李想所说,机舱盖的布局模式对于行人碰撞的安全性不太友好,激光雷达外壳边缘位置,在碰撞过程中坚硬的突起物很可能对行人造成更多的伤害。现在有一项「行人保护腿型试验」,这项试验的主标准(《GB24550-XXXX汽车对行人的碰撞保护标准》)将在2024年7月1日成为强制性国家标准。不过这一点后期有望通过OTA进行优化,在碰撞瞬间将激光雷达降下去,既保护行人,也保护激光雷达。
■ 邦点评
虽然激光雷达正在由半固态向固态过度,还未大规模实现应用,但车企已经开始对数量『内卷』着重宣传。我们需要明确的是,激光雷达只是辅助驾驶感知硬件中的一环,实现「高阶辅助驾驶」,需要与其他传感器和算法平台打配合,而不是一味地追求数量。而激光雷达的布局,则取决于如何在感知、美观、成本、安全这几者之间求得平衡。
回看历史,特斯拉从Mobileye到自研,技术迭代速度飞快,并且其功能也越来越实用和好用。所以对待这场已经掀起的激光雷达『内卷』,我们更愿意用第一性原理去看待它,这场『内卷』的本质是技术新兴期的百家争鸣,它们最终都将推动「高阶辅助驾驶」的历史进程。激光雷达的量产是条漫长的路,数量和布局的『内卷』只是暂时的,距离它真正走进百姓生活,我们还有很长一段路要走。正如《银河英雄传说》中的那句话:
我们的征途,是星辰大海。