
近日,飞凡汽车重磅官宣其全栈自研的RISING PILOT全融合高阶智驾系统正式落地,并将在10月随飞凡R7一同交付给用户。很多消费者不解,「全融合」是什么,它能为我的驾驶带来什么,再远一点,这会是未来自动驾驶的唯一指定算法吗?在与飞凡开完这场媒体沟通会后,这些问题或许已经有了答案。
■ 到底什么是「全融合」?
激光雷达『眼』中的世界
在说「全融合」这个概念之前,我们先来了解下什么是融合算法。打个比方,车身周围的各类传感器就是『眼睛』,发出各类行驶指令的系统是『大脑』,那么连接『大脑』和『眼睛』之间的『神经网络』便是融合算法,它会告诉『大脑』,『眼睛』看到的到底是什么东西,然后再由『大脑』做出决策。
在飞凡R7的「全融合」算法出现之前,市场上的主流分别是「前融合」和「后融合」。
「前融合」算法的工作逻辑
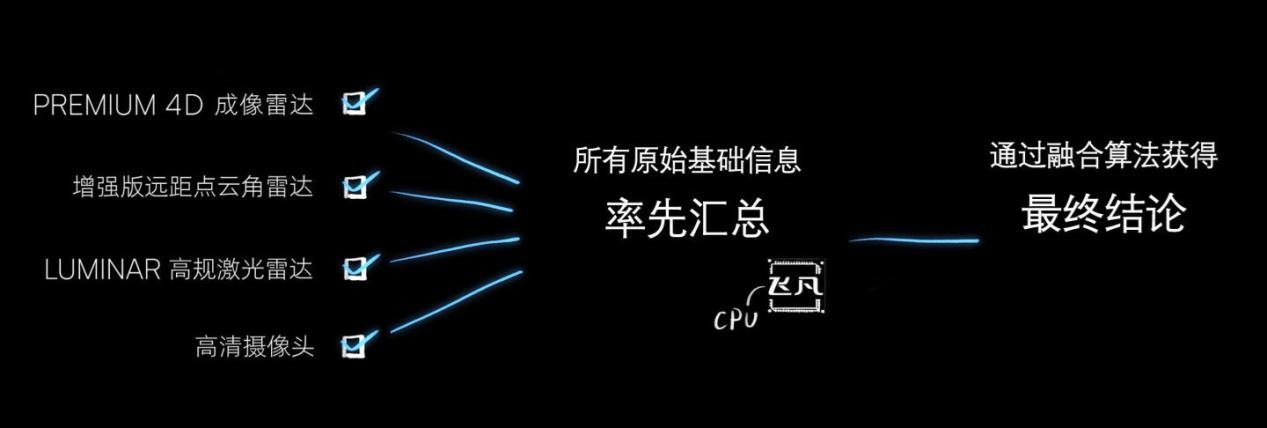
所谓「前融合」,是指所有传感器基于多任务神经网络算法,将来自激光雷达、摄像头和毫米波雷达的不同原始数据统一处理,相当于一套环绕全车360°的『超级传感器』,最后先输出的是一堆原始数据,然后再由算法输出观测结果。
这套方案的弊端在于,因为对不同类型源数据的时效性要求高,所以对硬件算力有更强要求。同时,神经网络有极低的概率会出现误判或失误,需要冗余的系统进行验证。如网上曾经有报道称,行驶在空旷路况时,中控屏提示有人经过,并显示『鬼影』,就是典型的前融合算法造成的误判。
「后融合」算法的工作逻辑
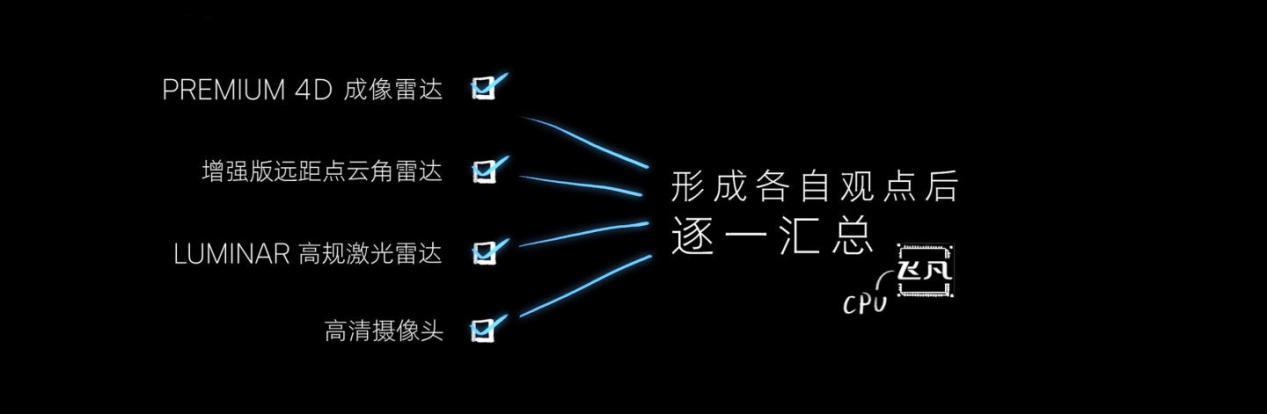
所谓「后融合」,是指不同的传感器各司其职,摄像头、毫米波雷达等分别通过不同的算法进行独立感知,完成识别后生成独立的信息,最后算法通过互为验证冗余的甄别,给出一个最靠谱的观测结果。
这套方案的弊端在于,由于是目标识别结果后再融合,碍于单一类型的传感器因自身能力限制,特定条件下可能会发生漏检或误检。如视觉传感器不擅长判断距离和位置,而雷达则不能识别文字信息,所以不同类型传感器的识别结果需要互相验证,同时需要做好各类传感器的决策权衡,才能达到更高的置信度。

将两者结合的「全融合」
于是,飞凡R7带着「前融合」和「后融合」两者结合的「全融合」出现了。这套算法会在视觉、毫米波、激光雷达等独立的感知结果进行后融合的同时,综合激光/毫米波+图像的前融合结果进行全要素全观测周期融合。

而支撑起这套「全融合」算法的则是飞凡R7全车的33个感知硬件与算力高达508TOPS的双英伟达Orin X芯片。33个感知硬件中,包括了Premium 4D成像雷达,800万像素摄像头以及全球首发量产的LUMINAR 1550 nm高规激光雷达。
这一切顶级硬件,都为「全融合」算法在智能驾驶上的大展拳脚打下了坚实的基础。
■ 「全融合」能为智驾带来什么?

有了强大的软硬件实力,剩下的就是靠实战验证成果、积累经验了。过去的900多天里,飞凡智驾团队在全国多城进行了40万公里的超长距离严苛测试,用飞凡的话说,就是『以100%的安全冗余应对1%的极端道路场景』,在此过程中,飞凡R7成功拿下了四个智能驾驶『鬼见愁』的场景。

匝道全域增强识别
难点:目前大多数智能驾驶技术,在匝道口多且复杂的情况下,可能导致智能驾驶识别失败而退出智驾模式,或者直接错过匝道。同时,如果对匝道或其他行驶车辆的识别不够提前,车道线不够清晰,车辆甚至在匝道内『蛇皮走位』,极易发生多车追尾。
突破:飞凡R7的RISING PILOT则可通过更远距离和更精准的综合感知,提前识别匝道三角区域,从而有更充裕的时间提前进行变道准备。同时能够实时识别前后车辆的行驶状态与趋势等周围路况,从而在安全范围内实现变道,并与前后车共同汇入匝道。

超灵敏静态路障感知
难点:目前大多数智能驾驶技术在遇到施工区域类场景时,因无法准确识别静态路障,而无法提前进行避让动作,或根本无法识别施工区域,极易发生碰撞事故。
突破:飞凡R7的RISING PILOT凭借LUMINAR激光雷达,可提前探测最远500m处的施工区域,并精准识别静态障碍物的三维几何位置、尺寸和类型,即便只有雪糕筒或施工提示牌也可提前精准识别,并通过预测和决策模型,快速反应实现提前避让。而Premium 4D成像雷达则可实现精准的速度以及加速度测量,与高清摄像头的全融合,能在探测中除目标之外,还能识别路沿、道路分叉口、自由空间等。
雨雪雾天超视距识别
难点:大多智能电动车搭载的视觉感知系统受天气影响较大,尤其像团雾、暴雨等低能见度的极端天气,会使视觉摄像头『致盲』,令驾驶员和智能驾驶系统都无法感知前方路况,如未开雾灯而突然减速,极易发生前后多车追尾事故。
突破:RISING PILOT凭借Premium 4D成像雷达拥有全天候适应能力,在团雾场景下仍可穿透团雾识别前方行车环境和障碍物,即使雨雾雪粉尘等恶劣天气仍然性能优良,不受光线影响。

预感知避让/礼节变道/侧向安全距离弹性保持
难点:多数车辆进行变道动作时,如遇其他车辆同时向同一车道变道时,或当前方车辆因驾驶员原因造成车身左右摇摆,车轮频繁压线,或行驶侧前方遇到大型车辆靠近自身的车道线时,无法进行提前识别和避让动作,只有两车靠近时才进行识别、预警或突然避让,稍有不慎就会发生碰擦等事故,存在极大安全隐患。
突破:RISING PILOT可凭借33个高感知传感器,实现360°无死角的道路感知,从而实时监测变道冲突场景,当发现有其他车辆同时变道并可能产生冲突时,可采取保守的安全策略,将安全放在首位,保持与周围车辆的安全距离,让冲突车辆先行,随后再完成变道等动作。

最后,飞凡R7 RISING PILOT还给留了一个『彩蛋』,大家可以在中控屏内找到一个叫MY PILOT的功能,这是行业首个可自主调节的智驾模式,设置支持用户在舒适、标准、运动等多种智驾风格的自定义,实现不同风格的智能驾驶行为决策。如在车辆较多且车辆行驶普遍较快的高速路场景,安全的权重增加,选择舒适模式,可减少变道行为;如在光线较好且车辆较少的高速路场景时,则效率的权重增加,可保证安全的前提下增加变道超车等。
而上面展示的这一切,都将在10月随飞凡R7一同交付给用户,完成最终的技术落地,这也彰显了飞凡对于这套「全融合高阶智驾系统」RISING PILOT的信心与诚意。
■ 邦点评
飞凡给自己立的目标,未来其在智能驾驶领域的目标是进入行业TOP 3,并且在智能驾驶的赛道走出一条『非凡之路』,毫无疑问,全栈自研的「全融合高阶智驾系统」RISING PILOT是这条路的起点。那么回到文章的开篇,R7上的「全融合」算法会让飞凡成为未来自动驾驶的『奇点』吗?
未来汽车『上半场是电气化,下半场是智能化』这句话想必大家都听过,而智能化的『上半场是硬件,下半场是软件』,飞凡汽车恰好每一步都走在了时代的脚印上,比现有算法更先进更安全的「全融合」无疑是未来智能驾驶的重要发展方向,就像飞凡汽车CEO吴冰所说的那样:『全融合算法也逐步成为未来行业技术趋势,未来智能驾驶的行业格局也将从此改变。』